| III.
CONTRÔLE DU VOL: PILOTAGE |
| III.1
- LE COUPLE DE RÉACTION DU ROTOR PRINCIPAL |
|

|
Pour se manifester, toute force prend appui
sur un support. Si le support est libre de bouger, il se déplace
en sens contraire de la force qui s'appuie sur lui. On dit que l'action
de la force est égale et opposée à la réaction
du support.
Il en va de même pour le rotor de l'hélicoptère.
Pour tourner, le mât rotor auquel est appliqué le couple
moteur (Cm) prend appui sur la structure de l'hélicoptère
qui est entraîné en sens contraire du rotor par un couple
de réaction (Cr) égal et opposé au
couple moteur (Cm).
Le couple de réaction rend alors impossible le vol de l'hélicoptère
qui se mettrait à tournoyer sur lui-même.
|
|
Pour que l'hélicoptère soit capable de
voler, il faut donc compenser ce couple de réaction : c'est
le but du ROTOR ARRIÈRE.
Il se comporte aérodynamiquement comme le rotor principal que nous
verrons plus loin dans l'article : en faisant varier l'incidence
de ses pales plus petites, le pilote fait varier la poussée Ty
pour compenser le couple moteur. Mais s'il le fait plus ou moins, il peut,
sur place, orienter en lacet
la cellule dans la direction qu'il veut.
Il en existe deux types :
- le rotor caréné dit "fenestron" comme sur
le "Dauphin" d'Eurocopter,
- le rotor classique non caréné comme sur l'"Écureuil"
aussi d'Eurocopter.
|

|
Pour contrôler le rotor
arrière, le pilote dispose d'une commande aux pieds :
LE PALONNIER
|

|
Le palonnier Pl en vert clair est composé
de deux pédales Pd et Pg qui, par une
timonerie, agissent sur une tige de commande Tc en violet
suivant les deux flèches rouge et verte. Cette tige traverse le
moyeu rotor Mr en bleu clair pour manœuvrer le plateau
de commande Pc en rose qui, à son tour, va agir sur
chaque biellette de commande Bc pour faire varier l'incidence
des pales et ainsi faire varier la poussée Ty afin
de compenser la couple moteur.
Sur la figure, pour équilibrer le couple
moteur : quand le pilote appuie, juste ce qu'il faut,
sur la pédale Pd de droite (flèche rouge),
la timonerie transmet une traction sur la tige de commande Tc
en violet (flèche rouge) qui va tirer le plateau de commande Pc.
Les biellettes de commandes Bc poussent alors les leviers
de pale pour augmenter leurs angles d'incidence ce qui augmente la poussée
Ty qui tire la queue de l'hélicoptère vers
la gauche pour empêcher la cellule de tournoyer sur elle-même.
|
Mais est-il possible de se passer
du rotor arrière ?
Mais
bien sûr que OUI !...
Mais
alors COMMENT ?
 Si
l'on supprime le rotor arrière,
Si
l'on supprime le rotor arrière,  il
faut absolument supprimer le couple moteur qui s'appuie sur la cellule, sans
quoi cette dernière se mettrait à tournoyer sur elle-même.
Il faut donc impérativement que le mouvement de rotation du rotor soit
entraîné par autre chose que la mat rotor. Le "rotor sans
couple" a été utilisée sur des appareils de petite
taille à pales réactives, la série SO 1100, 1110
et A 1120 Ariel I, II et III, le SO 1221 Djin
et le Farfadet de la Société SNCASO devenue aujourd'hui
Eurocopter. Le moteur génère un puissant souffle d'air qui passe
dans le mat rotor libre et qui ressort en bout de pales par des brûleurs.
Cette configuration n'a pas vécu longtemps car elle a montré ses
limites et présentait des inconvénients biens plus importants
que la configuration avec un rotor arrière.
il
faut absolument supprimer le couple moteur qui s'appuie sur la cellule, sans
quoi cette dernière se mettrait à tournoyer sur elle-même.
Il faut donc impérativement que le mouvement de rotation du rotor soit
entraîné par autre chose que la mat rotor. Le "rotor sans
couple" a été utilisée sur des appareils de petite
taille à pales réactives, la série SO 1100, 1110
et A 1120 Ariel I, II et III, le SO 1221 Djin
et le Farfadet de la Société SNCASO devenue aujourd'hui
Eurocopter. Le moteur génère un puissant souffle d'air qui passe
dans le mat rotor libre et qui ressort en bout de pales par des brûleurs.
Cette configuration n'a pas vécu longtemps car elle a montré ses
limites et présentait des inconvénients biens plus importants
que la configuration avec un rotor arrière.
|

|

Brûleur en bout de pales sur les Djin's.
|
C'est dans cette configuration que les premiers hélicoptères
ont été développés aux États-Unis. depuis 1942 et
en France au début des années 1950 sous le nom d'hélicoptères
à réaction.
| III.2
- LE VOL STATIONNAIRE |
Nous commencerons par cette configuration de vol, plus
facile à comprendre mais bien plus délicate en phase de pilotage.
Vous verrez pourquoi.
Nous l'avons déjà vu, pour que l'hélicoptère
puisse décoller, il faut que la force résultante de sustentation
Fn soit plus grande que son poids en charge P.
Cette force de sustentation est engendrée par la mise en rotation des
pales ayant une certaine incidence.
Nous avons vu aussi que cette force Fn
dépendait de la vitesse circonférentielle des forces
élémentaires fn tout au long des pales. Ces
forces s'expriment par la formule suivante :
fn = ½.k.s.v²
-
k est un coefficient qui dépend de
la masse volumique et de la température de l'air, de la forme de
l'élément en mouvement, de son état de surface,
-
s est la surface de l'élément
qui s'oppose au vent relatif,
-
v est la vitesse circonférentielle
de l'élément directement liée à la vitesse
de rotation du rotor.
Pour vous convaincre de l'existence de cette force et de
la manière dont vous pouvez la faire varier, il suffit de passer votre
main ouverte à travers la fenêtre de la porte de votre voiture
en mouvement. Vous constaterez que votre main tend à se soulever plus
ou moins :
- en fonction de son incidence,
- en fonction de la vitesse de la voiture si votre main garde une même
incidence.
Il y a donc deux façons de faire varier la force de sustentation
Fn :
-
augmenter la vitesse de rotation du rotor,
-
faire varier l'incidence des pales,
Les études et l'expérience ont montré
que la première solution n'était pas viable et ont mené
à privilégier un rotor tournant à vitesse constante
et qu'il était plus efficace et plus aisé de contrôler
la force Fn en commandant l'angle d'incidence des pales appelé
le pas. C'est la variation
du pas collectif .
|
|
Les pales peuvent pivoter suivant un axe horizontal
pour faire varier leur incidence. Pour chaque pale, une biellette
relie un levier qui lui est solidaire à un plateau qui peut
coulisser le long du mat rotor. Quand le plateau glisse vers le haut,
les biellettes poussent les leviers pour augmenter le pas, vers le
bas pour le diminuer.
Si le plateau coulisse parallèlement à
lui-même, le pas de toutes les pales varie de la même
quantité en même temps, c'est pourquoi on dit variation
du pas collectif ou aussi variation du pas général.
|
Pour contrôler le pas général,
le pilote dispose, à la gauche de son siège, d'un
levier qu'il peut manœuvrer vers le haut pour augmenter le
pas et vers le bas pour le diminuer. Une timonerie ( en turquoise)
permet à ce levier de faire coulisser le plateau parallèlement
à lui-même le long du mat rotor.
-
L'hélicoptère
est au repos : la force de sustentation Fn
est nulle et son poids P le maintient au sol.
- L'hélicoptère est au
sol et son rotor tourne à sa vitesse d'utilisation :
le pas général est faible donc la force de sustentation
Fn est faible et inférieure au poids en charge
P de l'appareil qui est maintenu au sol.
|
|
Note : la timonerie est présentée
de manière très simplifiée. C'est sans compter
la timonerie de la variation cyclique du pas expliquée plus
loin.
|
|

|
Donc, pour faire décoller son hélicoptère,
le pilote tire progressivement sur le levier de pas collectif pour
augmenter le pas général donc l'angle d'incidence de
chaque pale ce qui augmente la force de sustentation Fn.
Quand la force de sustentation Fn sera supérieure
au poids en charge P de l'appareil, ce sera le moment
du décollage. L'hélicoptère s'élève
tant que Fn > P.
Le pilote contrôlera le vol stationnaire
en maintenant Fn = P.
|
Mais cela ne
suffit pas ! Pourquoi ?
|
En effet, une fois en l'air, l'hélicoptère
est soumis à certains phénomènes comme, par exemple,
le vent qui tendra à faire
balancer la cellule sous son disque rotor de sustentation,
le poids des passagers, suivant
leur nombre, qui font varier le centrage Dc de l'appareil.
Fn n'est plus parfaitement égale
et opposée à P, l'hélicoptère
se trouve alors dans une instabilité que le pilote doit pouvoir
absolument compenser.
|

|
La cellule, en se balançant, fait basculer le disque
rotor. Toujours perpendiculaire au disque rotor, Fn change
de direction. Elle se décompose :
-
en une force Fz,
plus faible que Fn, qui tend à faire perdre de l'altitude :
comme nous l'avons vu plus haut, le pilote compensera facilement le phénomène
en tirant légèrement sur le levier du pas général
pour faire en sorte que Fz soit égale au poids P.
-
en une force Fx
qui tend à faire déplacer l'appareil. Ce phénomène
de balancement peut avoir lieu suivant toutes les directions, vers
l'avant, vers l'arrière, vers la droite, vers la gauche et tout cela
de manière combinées.
Pour maintenir le vol stationnaire, le pilote doit avoir le
moyen de maintenir Fx = 0 pour qu'il n'y ait aucun déplacement
et aussi Dc = 0 pour que le point d'application de la
force Fz confondue avec Fn soit à la verticale
du centre de gravité G qui est le point d'application
du poids en charge P de l'appareil.
|

|
Dans la posture montrée par la figure ci-contre,
il faut pouvoir créer un couple pour redresser l'appareil
autour du centre de son disque rotor.
Le disque rotor est solidaire de la cellule. On ne
peut pas le faire basculer. Donc, pour réussir la correction, il
ne reste plus qu'à trouver le moyen de jouer avec les forces élémentaires
fn pour agir sur la force résultante de sustentation
Fn.
Toujours dans la posture montrée par la figure
ci-contre, pour que ce couple existe, il faut décomposer le disque
rotor en deux secteurs, un secteur avant, en bleu, tiré impérativement
vers le haut par une force F2
et un secteur arrière, en vert, tiré vers le haut
aussi par une force F1 qui sera plus
faible que F2 de telle sorte que la force de sustentation
Fn soit la résultante des forces F1 et F2.
|
Chaque pale balaie une fois les deux secteurs à chaque
tour du rotor. Il faut donc que, à chaque tour c'est à dire cycliquement,
chaque pale voit son incidence augmenter quand elle parcourt le secteur avant
pour générer F2 et diminuer quand elle parcourt
le secteur arrière pour générer F1.
Ce changement de pas à chaque tour s'appelle le pas
cyclique. On obtient ce changement de pas en faisant pivoter plus ou
moins le plateau autour de son centre O (figure 2) alors que,
pour le pas collectif, le plateau se déplace parallèlement à
lui-même (figure 1).
On appelle communément ce plateau le
plateau cyclique.
|

Fig. 1 : Variation du pas collectif
|
Fig. 2 : Variation du pas cyclique
|
Chaque biellette reliant chaque levier de pas de pale au
plateau cyclique suit donc une trajectoire commandée par l'inclinaison
de ce dernier.
L'incidence de chacune des
pales qui tournent contraint en permanence le plan de rotation du rotor
à rester dans la position du plan du plateau cyclique.
MAIS COMMENT CELA PEUT-IL SE
FAIRE ?
|
Le plateau cyclique est l'élément essentiel
de la variation cyclique du pas. En fait, c'est un plateau qui, non seulement
peut coulisser le long du mat rotor sous l'action du levier de pas collectif,
mais peut aussi osciller
dans tous les sens autour d'une rotule Rt
(en rose). Ce sont les oscillations du plateau cyclique qui, commandées
par le pilote (manche cyclique), sont à la base de la variation
cyclique du pas pour contrer les phénomènes de balancement
de l'hélicoptère afin de maintenir le vol stationnaire.
Le plateau cyclique est relié par des biellettes
de pas Bp aux leviers de pales. Le plateau cyclique doit
donc tourner avec le rotor.
Le plateau est aussi relié aux biellettes de commande Bc
en turquoise actionnées par le pilote. Il doit être fixe.
Le plateau cyclique est en fait composé de deux flasques, l'une
fixe Pnt en bleu et l'autre tournante Pt en
jaune.
C'est le
compas en vert qui rend solidaire le plateau tournant Pt
en jaune autour du mat rotor Mr en marron. L'articulation
médiane du compas laisse le plateau libre de se déplacer.
|
|

| Bp |
:
|
Biellette de pas (en jaune). |
| Rl |
:
|
Roulement à biles (en rouge) qui permet de
faire tourner le plateau tournant Pt (en jaune) sur
le plateau non tournant Pnt (en bleu). |
| Bc |
:
|
Biellette de commande (en turquoise). |
| Pt |
:
|
Plateau tournant (en jaune) relié par biellettes
Bp (en jaune) aux leviers de pas des pales. |
| Rt |
:
|
Rotule (en rose) qui peut coulisser le long du mat
rotor Mr (en marron) et qui permet au plateau de pivoter
dans tous les sens. |
| Mr |
:
|
Mat rotor (en marron). |
| Cp |
:
|
Compas (en vert) qui permet de rendre solidaire le
plateau tournant Pt (en jaune) au mat rotor Mr
(en marron). |
| Pnt |
:
|
Plateau non tournant (en bleu). |
|
COMMENT ALORS CONTRÔLER
LES MOUVEMENTS DU PLAN DE ROTATION DU ROTOR ?
LE MANCHE CYCLIQUE
|

Pour lui permettre de prendre toutes les directions,
le plateau peut pivoter suivant 2 axes perpendiculaires :
-
l'axe [X,X'], pour une inclinaison vers
la droite ou vers la gauche, passe par les points G
et D de fixation des biellettes qui se déplacent
alors de la même quantité mais de sens opposé
pour le contrôle dit en roulis
,
- l'axe [Y,Y'], pour une inclinaison vers l'avant, vers l'arrière,
le point AV de fixation de la biellette monte (mise en
cabrer) ou descend (mise
en piquer)pour le contrôle
dit en tangage.
Naturellement, ces deux mouvements peuvent se combiner pour compenser
des mouvements de la cellule qui ne sont pas forcément dans le
sens des axes décrits.
|
|
Schéma de principe de la timonerie du manche cyclique
|
Le manche cyclique est situé devant le siège
du pilote entre ses jambes. Le manche peut pivoter dans toutes les directions
autour de son pivot Pv ce qui entraînera le basculement
du disque rotor comme si celui-ci lui restait en permanence perpendiculaire.
Ainsi, supposons que, lors du vol stationnaire, un effet
du vent fasse incliner l'hélicoptère vers la droite.
Pour contrer le phénomène, le pilote va pousser
le manche vers la gauche (g). Si l'on suit le sens des flèches
(g1, g2g, g2d, g3g, g3d) sur la timonerie en rouge, on voit que
le point G du plateau cyclique fixe (en bleu turquoise) descend
et que le point D monte de la même quantité autour
de l'axe [X, X']. Les points G et D
du plateau cyclique tournant (en jaune) obligent les biellettes de pales à
suivre la trajectoire de son bord, donc :
-
font diminuer l'incidence des pales qui passent dans
le demi-disque de gauche et la portance diminue,
-
font augmenter l'incidence des pales qui passent
dans le demi-disque de droite, la portance augmente.
Cette différence de portance crée un couple
qui tend à redresser le disque rotor, donc l'appareil, vers la gauche.
Maintenant, supposons que, lors du décollage, un
léger décentrage avant fasse incliner l'hélicoptère
vers l'avant.
Pour contrer le phénomène, le pilote va tirer
le manche à lui donc vers l'arrière. Si l'on suit sur la timonerie
en bleu turquoise (sans les flèches pour ne pas surcharger la figure),
on voit que le point AV du plateau cyclique fixe (en bleu turquoise)
va monter. Son point diamétralement opposé va descendre de la
même quantité autour de l'axe [Y, Y']. Les biellettes
de pales qui suivent la trajectoire du bord du plateau cyclique en jaune :
- font augmenter l'incidence des pales qui passent dans le demi-disque
avant : la portance augmente,
- font diminuer l'incidence des pales qui passent dans le demi-disque
arrière : la portance diminue.
Cette différence de portance crée un couple
qui tend à redresser le disque rotor, donc l'appareil, vers l'arrière.
Bien entendu, les deux actions décrites peuvent se
combiner entre elles.
Dans tous les deux cas, une fois la position de l'appareil
corrigée, le pilote remettra le manche dans une position dite 'au
neutre'. Il faut bien voir que, pour le vol stationnaire et c'est c'est
là toute la finesse du pilotage, le pilote va devoir déplacer
en permanence son manche d'une quantité presque micrométrique
pour que sa machine reste la plus immobile possible au dessus d'un point fixe
du sol.
Précision concernant
la variation du pas collectif : la
timonerie de la variation du pas collectif a été présentée
avec un schéma volontairement simplifié pour ne pas anticiper
sur la description de la variation du pas cyclique. En réalité,
comme le plateau cyclique ne peut être relié que par les trois
biellettes du pas cyclique, le levier de pas général fait monter
ou descendre, parallèlement à lui-même, le support
sur lequel sont fixés les leviers de renvoi L1,
L2, L3, L4.
Les 3 biellettes montent ou descendent de la même quantité sans
changer l'inclinaison du plateau cyclique.
|

|
En résumé, le poste de pilotage d'un hélicoptère
comporte les 3 leviers de commande fondamentaux :
- à main gauche, le levier
de variation du pas collectif qui sert à contrôler
les mouvement en altitude,
- au centre, le manche
de variation du pas cyclique qui sert à contrer les
mouvement d'instabilité de la cellule,
- aux pieds, le palonnier
qui sert à contrer l'effet du couple moteur et aussi à
contrôler l'azimut de la cellule.
|
A peine l'hélicoptère
a-t-il décollé que le pilote, pour maintenir le vol stationnaire,
doit ajuster en permanence le fin dosage dans la manipulation simultanée
de ces trois commandes de vol.
| III.3
- LE VOL TRANSLATIONNEL |
En stationnaire, pour maintenir son hélicoptère
en vol stabilisé, le pilote doit contrer sans cesse des mouvements
qu'il ne contrôle pas et qui sont parasites en quelque sorte.
Et bien, pour le vol translationnel, c'est extrêmement
simple... à comprendre bien sûr !..., le pilote va exploiter
"l'avantage de l'inconvénient" c'est-à-dire,
justement en provoquant des mouvements qui vont lui permettre de déplacer
son aéronef dans l'air.
REGARDONS DONC
LES DIFFERENTES PHASES DU VOL :
1 - DECOLLAGE
ET DEPLACEMENT VERS L'AVANT :
|
Note :
On suppose, pour l'explication, qu'il n'y a pas de vent, que le centrage
est réglé, donc qu'il n'y a pratiquement aucun phénomène
extérieur parasite.
|
|
L'appareil est au sol, rotor tournant à sa vitesse de rotation
nominale. Les passagers et le pilotes sont assis à bord. Les bagages
sont chargés dans la soute. Entre autre, le pilote, seul
responsable du vol pour les organismes de la sécurité
aérienne, a vérifié au préalable :
-
que le poids total
en charge n'excède pas le poids maximum autorisé par
le constructeur,
-
que le centrage
reste dans les limites imposées par le constructeur,
-
que toutes les vérifications
préalables des sécurités vitales ont
été faites dans une procédure appelée
"pré-vol" suivant une liste de points indiqués
par le constructeur,
- qu'il a été autorisé à décoller
par les organismes de la régulation aérienne desquels
il dépend.
Le pilote positionne les trois commandes à
savoir, le levier L de variation du pas collectif, le manche
M de variation du pas cyclique, et le palonnier P
sensiblement "au neutre".
L'hélicoptère reste au sol. Donc, pour le moment, la force
de sustentation Fn est largement moins importante que le
poids total P de l'appareil en charge :
Fn < P
|
 |
|
Pour décoller, il faut que la force de sustentation
Fn devienne plus importante que le poids P.
Pour ce faire, le pilote tire à lui, avec
délicatesse, le levier L de variation
du pas collectif. Il augmente ainsi l'incidence de toutes les pales du
rotor et Fn augmente jusqu'à ce qu'elle
soit plus grande que le poids P. L'appareil décolle
et prend de l'altitude. Quand le pilote juge que l'altitude est suffisante,
environ 5 mètres de hauteur, il maintient le levier L
dans une position où la force Fn est égale
au poids P pour maintenir l'appareil en vol stationnaire.
|

|
|

|
Maintenant, pour faire déplacer l'appareil
vers l'avant, il faut générer une force Fx
de translation. Pour cela, il faut que le pilote pousse, avec
délicatesse, le manche M de variation
du pas cyclique pour faire pivoter la force Fn de sustentation
vers l'avant. L'angle d'incidence des pales qui parcourent le demi-disque
avant du rotor diminue. L'angle d'incidence des pales qui parcourent le
demi-disque arrière du rotor augmente d'une même quantité.
Un couple de bascule est généré. La force Fn
se décompose alors en 2 composantes, la composante Fx
qui va enclencher le mouvement vers l'avant et la composante Fz
de sustentation qui s'opposera au poids P de l'appareil.
Mais dans la manoeuvre, la composante Fz est inférieure
à la force Fn de sustentation et ne compense plus
le poids P de l'appareil qui a tendance à perdre
de l'altitude. Le pilote dosera à nouveau et en même temps
sa traction sur le levier L de variation du pas collectif
pour conserver son altitude.
Avec le palonnier P qui compense le couple moteur, le pilote
maintiendra la cellule dans la direction du vol.
|
2 - DEPLACEMENT
EN VIRAGE :
Pour faire virer son appareil vers la droite par exemple
et suivant le même principe qui vient d'être décrit pour
aller en avant le pilote pousse le manche M vers la droite pour
générer les mêmes phénomènes de forces mais
appliqués aux demi-disques de côté du rotor. Il y aura le
même type d'action avec le levier L de variation du pas
collectif. Mais là, le pilote devra "mettre un peu de pied à
droite" sur le palonnier P pour que l'axe de la cellule
reste sensiblement perpendiculaire au rayon de courbure du virage. Ce sera la
même chose vers la gauche. En effet, aucune direction n'est privilégiée.
Eh oui !... le palonnier
P ne sert pas à
diriger l'appareil comme on pourrait le croire, mais à contrôler
la symétrie du vol.
Une remarque sur une idée
fausse à propos des virages :
On peut normalement croire que, pendant tout un virage,
les commandes sont maintenues dans leur position comme pour le volant des automobiles.
Il n'en est rien. Si le phénomène est beaucoup moins sensible
sur un hélicoptère à cause de sa grande instabilité
(la cellule est une espèce de balançoire), ce n'est pas du tout
le cas pour les avions et les planeurs par exemple. En effet, quand on met du
manche d'un côté, l'avion s'incline tant que l'on maintient le
manche dans la position jusqu'à passer sur le dos. Donc, pour exécuter
un virage avec un aéronef à voilure fixe ou tournante il y a 3
phases :
- la mise en virage : les commandes sont positionnées
pour générer les différentes forces nécessaires
à la manoeuvre et sont maintenues jusqu'à ce que l'appareil
soit dans la position voulue pour virer.
- le maintien en virage : les commandes sont sensiblement
remises dans la position d'avant la mise en virage pour laisser les forces
dans un état stable qui permet à l'appareil d'effectuer le
virage. Bien sûr, pendant cette opération, le pilote peut avoir
besoin de corriger la tenue de la trajectoire mais ce sera faiblement en
principe.
- la sortie de virage : en fin de virage, les commandes
sont positionnées de manière à contrer les forces qui
ont permis le virage afin de remettre l'appareil dans sa posture d'avant
la mise en virage.
MAINTENANT, EN VOL STATIONNAIRE,
QUE SE PASSE-T-IL SI LE PILOTE TIRE LE MANCHE A LUI AU LIEU DE LE POUSSER ?
Tout fonctionne de la même manière que pour
aller vers l'avant ou vers le côté. L'hélicoptère
se met à reculer. Bien sûr, le pilote devra le faire avec toutes
les précausions d'usage pour les dangers que représente la manoeuvre.
Un
hélicoptère peut très facilement voler avec une
cellule pouvant se trouver dans n'importe quelle
position autour de son axe rotor, sa meilleure
aéodynamique se trouvant bien entendu en vol
symétrique.
L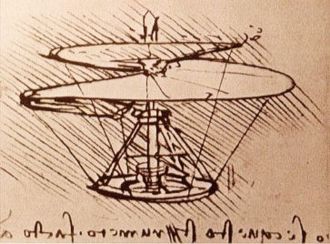
 éonard
de Vinci est considéré comme l'inventeur
de l'hélicoptère en ayant proposé une machine volante
qu'il a appelée la vis aérienne.
Il aurait dit, paraît-il : «Un
jour l'homme volera comme un oiseau ». Il ne croyait pas si
bien dire puisque l'homme sait faire ce que l'oiseau ne sait pas faire, par
exemple le vol sur le dos avec un avion et le vol stationnaire avec un hélicoptère.
Avec ce dernier, il sait, tout comme l'oiseau, se poser sur une surface de la
taille de ses "pattes".
éonard
de Vinci est considéré comme l'inventeur
de l'hélicoptère en ayant proposé une machine volante
qu'il a appelée la vis aérienne.
Il aurait dit, paraît-il : «Un
jour l'homme volera comme un oiseau ». Il ne croyait pas si
bien dire puisque l'homme sait faire ce que l'oiseau ne sait pas faire, par
exemple le vol sur le dos avec un avion et le vol stationnaire avec un hélicoptère.
Avec ce dernier, il sait, tout comme l'oiseau, se poser sur une surface de la
taille de ses "pattes".
|
L'hélicoptère
est le seul appareil volant qui peut reculer et faire du vol stationnaire.
|
Même les oiseaux n'y sont pas capables hormis
le colibri.
C'est d'ailleurs le nom qu'a donné la Société
Eurocopter à l'un de ses appareils le EC-120 :

|

|
--ooOoo--
